Agent Avoidance
Quantum implements a variation of the collision avoidance technique called Hybrid Reciprocal Velocity Obstacles (HRVO).
Setting up Avoidance Agents
The NavMeshAvoidanceAgent component requires the entity to already have a NavMeshPathfinder and a NavMeshSteeringAgent component.
Simulation Config
The avoidance requires the following global parameters located on the SimulationConfig in the Navigation section.
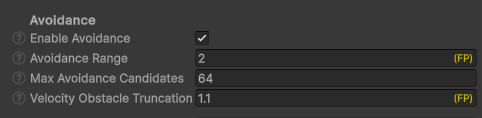
Disable EnableAvoidance to completely remove any overhead from the avoidance system.
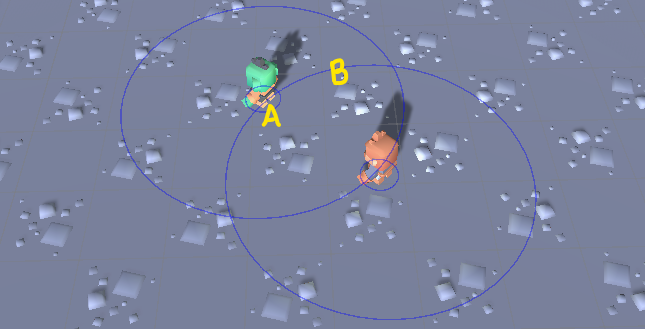
AvoidanceRange is crucial to the quality and performance cost of the avoidance system. It defines the range in which agents start to influence each other. The range is measured between the radii of two agents. (A) is the avoidance radius of an individual agent, and (B) is the avoidance radius of the agent plus the global AvoidanceRange.
inRange = Distance(positionAgentA, positionAgentB) - radiusAgentA - radiusAgentB < AvoidanceRange
MaxAvoidanceCandidates defines the maximum number of avoidance candidates used by each agent. More candidates requires more memory and CPU but also increase the quality. The higher the AvoidanceQuality and the more agents that are influencing each other, the higher this number has to be.
VelocityObstacleTruncationFactor defines how much a VO is truncated for non-moving obstacles.
NavMeshAgentConfig - Avoidance
AvoidanceType |
Sets the active avoidance mode of the agent.
None = the agent will not avoid others but others will avoid itInternal = the agent will actively avoid other agents using the internal avoidance systems |
AvoidanceQuality |
Sets the active avoidance mode of the agent.
None = the agent will not avoid others but others will avoid itInternal = the agent will actively avoid other agents using the internal avoidance systems |
Priority |
The agent Priority works as in Unity.
Default = 50Most important = 0Least important = 99
Because the avoidance system relies on reciprocity, the avoiding-work (who will avoid whom, and by how much) is always split between the agents. Higher priority agents do only 25% of the work while agents of the the same priority split the work 50/50. |
AvoidanceRadius |
The avoidance radius of this agent should roughly match the visual character size.
Together with the avoidance radius from the SimulationConfig it is used during the avoidance broadphase that creates agent pairs that influence each other. |
AvoidanceLayer |
Sets the avoidance layer of this agent.
The Unity layers are used for AvoidanceLayer and AvoidanceMask to filter agents. |
AvoidanceMask |
Sets the avoidance mask of this agent. Agents that have an AvoidanceLayer that is not contained in the mask will be ignored.
|
MaxAvoidanceCandidates |
Sets the maximum number of avoidance candidates for this agent type. The global max is set in the SimulationConfig. |
ReduceAvoidanceAtWaypoints |
Solving avoidance while also trying to follow waypoints to steer around corners or through narrow passages is hard. To mitigate the problem and to accept visual overlapping in favor of agents blocking each other toggle ReduceAvoidanceAtWaypoints. |
ReduceAvoidanceFactor |
The avoidance applied when an agent is getting close to a waypoint is reduced. The ReduceAvoidanceFactor value is multiplied with the agent radius and then represents the distance in which the avoidance influence is reduced quadratically. |
AvoidanceCanReduceSpeed |
This option allows velocity candidates to decrease the agent's speed, making avoidance maneuvers look more natural. |
ShowDebugAvoidance |
Defines if velocity obstacles and candidates are drawn as gizmos during run-time. |
Setting up Avoidance Obstacles
Avoidance Obstacles are static or moving entities that influence the avoidance behavior of Navmesh agents but are not agents themselves. They do not influence the path finder and should not be used to block parts of the game level.
A NavMeshAvoidanceObstacle component requires a Transform2D or Transform3D component to work properly.
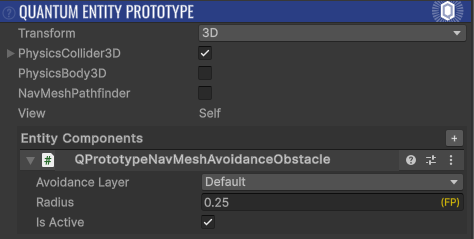
If the entity that has a NavMeshAvoidanceObstacle component is moving, other agents require its velocity information to predict its future position and the NavMeshAvoidanceObstacle.Velocity has to be set manually.
Add a NavMeshAvoidanceObstacle to a Quantum Entity Prototype in Unity.
Or add it in code.
C#
var c = f.Create();
f.Set(c, new Transform2D { Position = new FPVector2(8,-2) });
var obstacle = new NavMeshAvoidanceObstacle();
obstacle.AvoidanceLayer = 0;
obstacle.Radius = FP._0_50;
obstacle.Velocity = FPVector2.Zero;
f.Set(c, obstacle);
Jittering Agents
The agent movement, particularly their movement direction, can be unstable due to the nature of the avoidance calculations in conjunction with fixed-point math. This causes the agents to jitter visibly.
To mitigate this, the Angular Speed of the agents can be tuned down, or view smoothing can be added. This can be done by overriding the QuantumEntityView class and adding blending to the rotation when applying the transforms.
C#
namespace Quantum {
using UnityEngine;
public class SmoothRotationEntityView : QuantumEntityView {
public float Blending = 15;
private Quaternion rotation;
protected override void ApplyTransform(ref UpdatePositionParameter param) {
// Override this in subclass to change how the new position is applied to the transform.
transform.position = param.NewPosition + param.ErrorVisualVector;
// Unity's quaternion multiplication is equivalent to applying rhs then lhs (despite their doc saying the opposite)
rotation = param.ErrorVisualQuaternion * param.NewRotation;
transform.rotation = Quaternion.Lerp(transform.rotation, rotation, Time.deltaTime * Blending);
}
}
}